
搜索结果: 1-15 共查到“柔性多体力学 系统”相关记录16条 . 查询时间(3.392 秒)
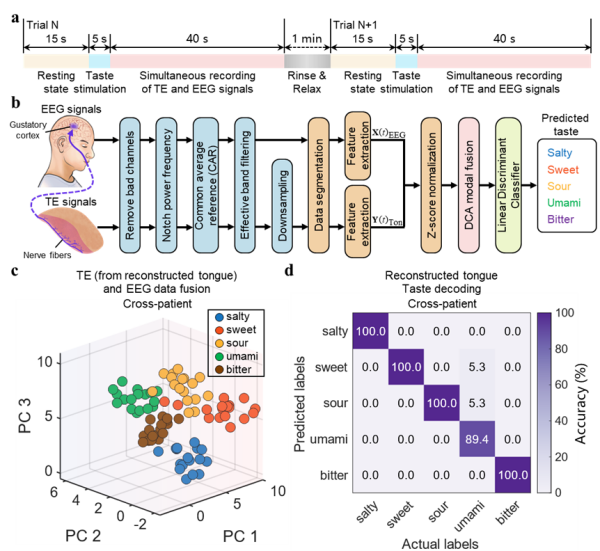
中国科学院上海微系统所等开发出高通量超柔性味觉神经界面 助力患者重建味觉功能(图)
系统 柔性 神经 界面
2024/10/24
味觉是最重要的生理感觉之一,能够帮助人类鉴别食物的营养价值与潜在毒性,从而选择合适的食物以满足能量与营养需求,并避免摄入有毒有害物质。因此,味觉对人类的生存与进化至关重要。舌癌是恶性肿瘤,近年来发病率呈现逐年攀升的趋势。舌癌病灶直接侵犯舌头的味觉感受区域,而放化疗等治疗方式可能损伤口腔组织。研究发现,游离组织皮瓣修复重建舌癌术造成的组织缺损,使得患者味觉减退甚至完全丧失味觉功能,影响患者整体生活质...
2024年4月3日,中国科学院大连化学物理研究所催化基础国家重点实验室二维材料化学与能源应用研究组(508组)吴忠帅研究员团队设计制备出与平面储能器件特性相匹配的二维超薄、高容量的铁基沸石咪唑盐骨架/石墨烯异质结构(Fe-ZIF/G)纳米片,进一步采用喷涂方法,打印出柔性高比能平面微型超级电容器,并基于此开发出全柔性、高灵敏、一体化自供电的气体传感集成微系统。

上海微系统所在石墨烯量子点荧光发光机制研究方面取得进展(图)
石墨烯 量子点材料 柔性
2024/4/14
2024年3月21日,中国科学院上海微系统与信息技术研究所纳米材料与器件实验室丁古巧团队在石墨烯量子点制备及荧光机制研究方面取得重要进展。该工作加深了对石墨烯量子点发光机理的理解,同时实现了对多变量体系下机器学习辅助材料制备结果所包含物理内涵的阐释。相关论文以 “Precursor Symmetry Triggered Modulation of Fluorescence Quantum Yiel...
中华人民共和国科学技术部科学家利用超高密度脑电记录系统实现单个手指运动精准解码
系统 柔性 空间
2024/9/8
脑机接口(BCI)技术能让用户在不移动身体的情况下操作外部设备。基于脑电图(EEG)的BCI系统具有时间分辨率高、使用方便和便携等优点。然而,有关高空间分辨率EEG对解码精确肢体运动(如手指运动)的研究仍然较少。韩国科学技术院等合作通过超高密度脑电记录系统实现单个手指运动精准解码。该研究成果于2023年9月8日发表在期刊《Frontiers in Neuroscience》上,题为:Individ...
动力转向系统用中低压柔性软管
动力转向系统 柔性软管
2008/9/16
该系列产品主要用于动力转向循环回路中的吸油段、回油段以及储油段。项目针对氯磺化聚乙烯的特点,在配方中使用耐高温的增塑剂、防老剂和特殊加工助剂,提高了材料耐热性能,改善胶料的粘辊性能;利用材料低温硬、高温软、流动性好的特点,采用了高温挤出加工的方式组织生产,提高了挤出效率;改善了脱模的方式,消除产品裂品,提高了产品的合格率。
柔性电子系统及其力学性能
柔性电子系统 薄膜 柔性基板 交联导电体
2008/9/9
建立在柔性和可延性基板之上的新兴电子技术通称为柔性电子技术.
由于其独特的柔性和延展性,
柔性电子系统在很多方面有着广阔的应用前景.
柔性电子系统具有相似的结构特点和材料特性.
对其组成部分的力学性能研究是柔性电子技术研发过程的重要组成部分.
对柔性电子系统的相关背景及其研究现状进行全面的介绍和评述.
首先介绍了柔性电子系统的概念和在实际应用领域中的研究进展;
然后介绍了它的基本结构...
考虑刚弹耦合作用的柔性多体连续系统动力学建模
Hamilton原理 柔性多体系统动力学 刚弹耦合 建模
2007/7/28
基于Hamilton原理建立起一般柔性体连续系统的动力学建模方法,进而以水平面内作大范围回转运动的柔性梁为例,在Euler-Bernoulli梁模型的假设前提下,根据轴向不可伸长的柔性梁的几何约束条件;推导出作大范围刚体运动的柔性梁连续系统的一致线性化振动微分方程.采用假设模态法对其离散化,导出考虑刚弹耦合作用的柔性梁有限维离散化动力学模型.最后给出仿真算例,验证了该方法的有效性.
柔性多体系统动力学STIFF微分方程数值积分方法适用性分析
柔性多体 STIFF微分方程 数值研究
2007/7/28
柔性多体系统动力学微分方程都存在不同程度的STIFF,本文通过大量数值实验分析了几种常用数值积分方法,如四阶Runge-Kuta法、Trenor法、Adams法、Gear法及Newmark法对处理不同STIFF程度的适用性,得到了一些有意义的结论.
柔性多体系统动力学研究动态
柔性多体系统动力学 stiff方程 数值方法 符号演算
2007/7/28
摘要本文主要对国外在柔性多体系统动力学领域中进行的研究进行了简要综述和介绍,同时也介绍了一些国内的情况,并提出了该领域中存在的问题。
摘要对柔性多体系统计算建模的研究现状和近期进展进行了总结. 重点讨论了柔性多体
动力学的以下内容: 柔性构件的建模, 约束建模, 求解技术, 控制策略, 耦合问
题, 设计和实验的研究. 对柔性多体系统建模的浮动坐标系,转动坐标系和惯性系
等3种坐标系的特点进行了对比. 指出了未来的研究方向, 包括柔性多体系统的新
的应用,如微观力学系统和超微观力学系统等; 提高这些模型的计算精度和效率的
技巧和...
摘要介绍了国内外柔性多体系统动力学实验研究现状,分为三个方面,即理论模型验证实验、
动力学特性的实验研究和其它实验.柔性多体系统动力学建模理论的发展经历了3个阶段:
运动-弹性动力学(KED)方法、传统混合坐标方法和计及了动力刚化效应的各种非线性理论.
关于这些理论的模型验证实验均在本文中作了重点介绍.文中还对柔性多体系统动力学性态
的研究实验也作了介绍,包括系统模态特性和共振等非线性力学行为.关...
摘要全面综述了柔性多体系统动力学近年来的研究成果.对建模方法、模态选取及模态综合、动力刚化及柔性多体系统动力学中微分-代数方程的数值方法等研究热点进行了详细的阐述,并简要展望了柔性多体系统动力学今后的发展趋势
柔性多体系统刚-柔耦合动力学
柔性多体系统 刚柔耦合 动力刚化
2007/7/28
摘要首先指出大量复杂系统动力学与控制性态分析与优化等工程问题对柔性多体系统动力学领域的进一步需求,在回顾柔性多体系统动力学研究的若干阶段与当前的研究现状后指出:柔性多体系统刚- 柔耦合动力学的研究是多体系统动力学的一个新的阶段.文末提出了刚- 柔耦合动力学的研究任务。
多柔体系统碰撞动力学研究综述
多柔体系统动力学 碰撞 间隙 控制
2007/7/28
摘要多柔体系统碰撞动力学研究具有重要的研究价值和工程实际意义,本文针对多柔体系统碰撞动力学研究中的几个基本问题进行了全面的分析和评述,其中包括多柔体系统动力学方程的描述、碰撞模型的建立、铰接间隙引起的碰撞问题、数值算法、实验研究、控制等几个方面,并根据目前的发展现状和研究中存在的问题,指出了今后多柔体系统动力学碰撞研究中的发展方向